thang010146 | Robot arm 1b @thang010146 | Uploaded 6 months ago | Updated 3 days ago
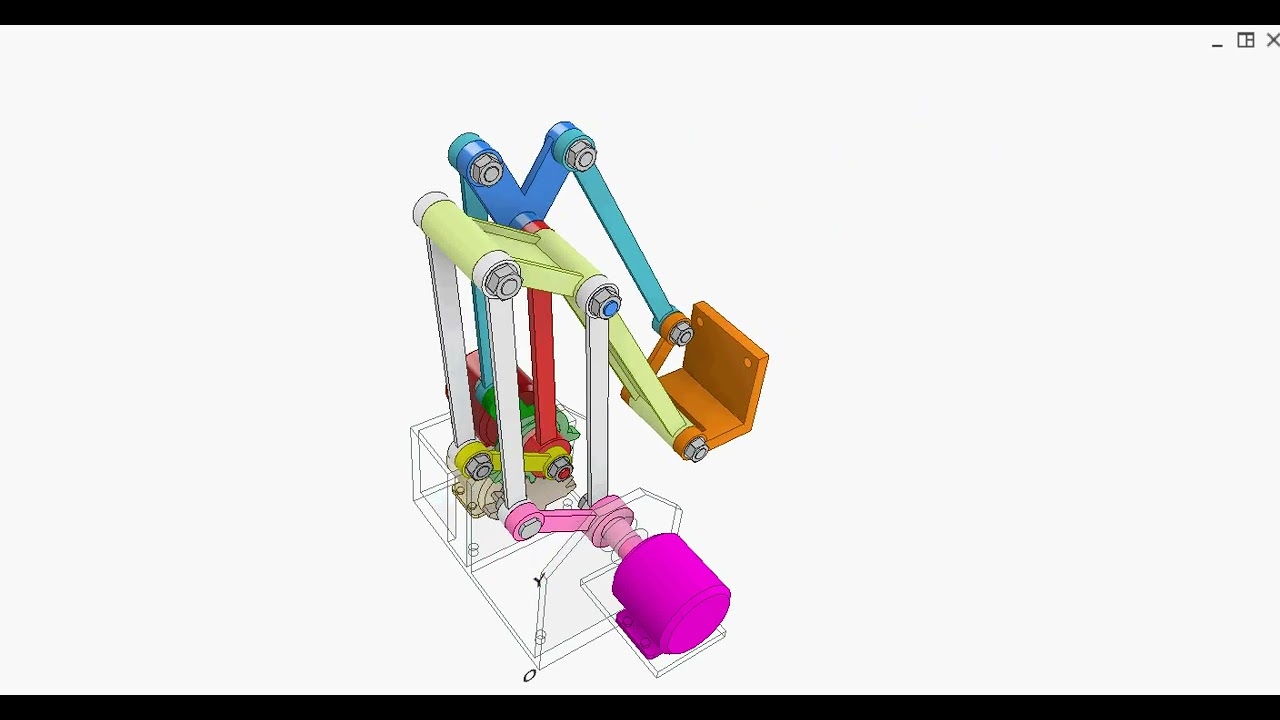
The orange end effector can move in the XOY vertical plane (3 degrees of freedom). The effector is pivoted at the end of the yellow connecting rod of a parallelogram mechanism (pink, red, yellow and white). The input motions of the red and pink cranks are provided by red and pink grounded servo motors. They make the effector move in X and Y derections.
The direction of the effector is controlled by the beige grounded servo motor via two parallelogram mechanisms (blue and jade) and a spur gear drive.
Unstable positions of the parallelogram mechanisms are prevented when programming the motors.
This video was made based on:
youtu.be/pQ_CdrepHeo
The orange end effector can move in the XOY vertical plane (3 degrees of freedom). The effector is pivoted at the end of the yellow connecting rod of a parallelogram mechanism (pink, red, yellow and white). The input motions of the red and pink cranks are provided by red and pink grounded servo motors. They make the effector move in X and Y derections.
The direction of the effector is controlled by the beige grounded servo motor via two parallelogram mechanisms (blue and jade) and a spur gear drive.
Unstable positions of the parallelogram mechanisms are prevented when programming the motors.
This video was made based on:
youtu.be/pQ_CdrepHeo
. The effector is pivoted at the end of the yellow connecting rod of a parallelogram mechanism (pink, red, yellow and white). The input motions of the red and pink cranks are provided by red and pink grounded servo motors. They make the effector move in X and Y derections.
The direction of the effector is controlled by the beige grounded servo motor via two parallelogram mechanisms (blue and jade) and a spur gear drive.
Unstable positions of the parallelogram mechanisms are prevented when programming the motors.
This video was made based on:
https://youtu.be/pQ_CdrepHeo")
 and the screw-nut drive.
The adjustable height is kept stable thanks to the self-locking screw-nut drive.
STEP files of this video:
https://www.mediafire.com/file/2o7nswjc1qh0vdi/MotorizedLiftingTableSTEP.zip/file
Inventor files of this video:
https://www.mediafire.com/file/0ynfop1dt6hev7g/MotorizedLiftingTableInv.zip/file")

.
The gear meshes with the blue rack. The gearbox has 4 rollers that roll along a blue runway fixed to the rack and yellow door.
The gearbox is connected to the stationary wall by a pink connecting rod. This arrangement allows the gearbox to be shifted when the door moves laterally.
Yellow door slide on two blue rails. The 45 deg. corners at the rail ends make the door flush with the wall.
This design is used for van sliding doors:
https://www.researchgate.net/publication/351108129_Design_and_Prototyping_of_Powered_Sliding_Door_for_Light_Commercial_Vehicles
STEP files of this video:
https://www.mediafire.com/file/l8ve4p66is4s7vg/MotorizedFlushDoor3STEP.zip/file
Inventor files of this video:
https://www.mediafire.com/file/d340irw7pxgochq/MotorizedFlushDoor3Inv.zip/file")
 at the bottom so the center of mass of the toy is lower than the center of the spherical base of the toy. When pushed over, the toy wobbles for a few moments while it seeks the upright orientation.
The pink hammer acts as a pendulum and strikes the red vibrating wires of different lengths to create musical sounds.
This video is made based on the patent:
https://patents.google.com/patent/US3921331A/en")
. The input motions of the red and pink cranks are provided by red and pink grounded servo motors.
The direction of the effector is kept unchanged by two parallelogram mechanisms (blue and jade).
Unstable positions of the parallelogram mechanisms are prevented when programming the motors.
This video was made based on:
https://youtu.be/pQ_CdrepHeo
STEP files of this video:
https://www.mediafire.com/file/rg08q3e6xn00spj/RobotArm1aSTEP.zip/file
Inventor files of this video:
https://www.mediafire.com/file/bmno5390hi8x97f/RobotArm1aInv.zip/file")



 allows the orange screw to rotate together the input screw and move axially together with the green slider.
The first and second screw-nut drives have leads of L1 and L2 mm of the same hand.
If the input screw rotates N revolutions, the pink slider performs a displacement of N*(L1+L2) mm.
This mechanism has not been tested in practice.")

