Mathemaniac | Theorema Egregium: why all maps are wrong @mathemaniac | Uploaded 1 year ago | Updated 2 hours ago
Head to squarespace.com/mathemaniac to save 10% off your first purchase of a website or domain using code mathemaniac.
Website for files download (remember to use the password shown in the video!): mathemaniac.co.uk/download
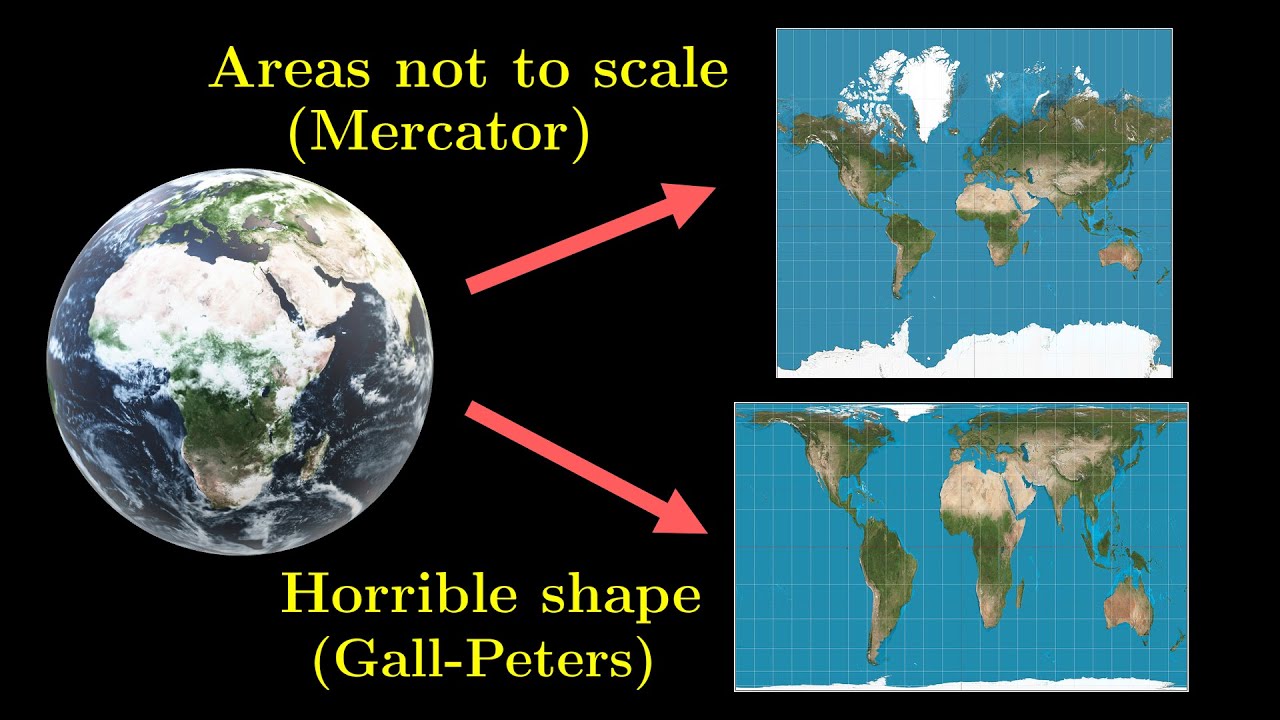
The Mercator projection is the standard world map, but it famously makes Greenland and Africa the same size, but in reality, Greenland is so much smaller. Gall-Peters projection aims to solve exactly this area mismatch problem, but the shape resulted is horrible, and actually unsuitable for any navigation, unlike Mercator. Can we make a world map that preserves both areas (like Gall-Peters) and angles (like Mercator)? No, and the reason why is Theorema Egregium, the subject of the video.
Traditionally, Theorema Egregium was proved with a lot of tedious calculations, and somehow magically, you can compute the curvature with the "first fundamental form", whatever that means. It took until more than a century later than its original discovery that a geometric proof was found, and is presented here.
Theorema Egregium, more traditional proof, going through first and second fundamental forms: dpmms.cam.ac.uk/~gpp24/dgnotes/dg.pdf
Tristan Needham's book on visual differential geometry: amazon.co.uk/Visual-Differential-Geometry-Forms-Mathematical/dp/0691203709
Video chapters:
00:00 Introduction
02:40 Chapter 1: Curvature
10:32 Chapter 2: Spherical areas
17:34 Chapter 3.1: Gauss map preserves parallel transport
22:15 Chapter 3.2: Geodesics preserved
27:16 Chapter 3.3: Parallel transport preserved
31:46 Chapter 3.4: Area = holonomy on sphere
36:43 Chapter 4: Tying everything together
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I don't use his animation engine Manim, but I use PowerPoint, GeoGebra, and (sometimes) Mathematica to produce the videos.
Social media:
Facebook: facebook.com/mathemaniacyt
Instagram: instagram.com/_mathemaniac_
Twitter: twitter.com/mathemaniacyt
Patreon: patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: mathemaniac.myspreadshop.co.uk
Ko-fi: ko-fi.com/mathemaniac [for one-time support]
For my contact email, check my About page on a PC.
See you next time!
Head to squarespace.com/mathemaniac to save 10% off your first purchase of a website or domain using code mathemaniac.
Website for files download (remember to use the password shown in the video!): mathemaniac.co.uk/download
The Mercator projection is the standard world map, but it famously makes Greenland and Africa the same size, but in reality, Greenland is so much smaller. Gall-Peters projection aims to solve exactly this area mismatch problem, but the shape resulted is horrible, and actually unsuitable for any navigation, unlike Mercator. Can we make a world map that preserves both areas (like Gall-Peters) and angles (like Mercator)? No, and the reason why is Theorema Egregium, the subject of the video.
Traditionally, Theorema Egregium was proved with a lot of tedious calculations, and somehow magically, you can compute the curvature with the "first fundamental form", whatever that means. It took until more than a century later than its original discovery that a geometric proof was found, and is presented here.
Theorema Egregium, more traditional proof, going through first and second fundamental forms: dpmms.cam.ac.uk/~gpp24/dgnotes/dg.pdf
Tristan Needham's book on visual differential geometry: amazon.co.uk/Visual-Differential-Geometry-Forms-Mathematical/dp/0691203709
Video chapters:
00:00 Introduction
02:40 Chapter 1: Curvature
10:32 Chapter 2: Spherical areas
17:34 Chapter 3.1: Gauss map preserves parallel transport
22:15 Chapter 3.2: Geodesics preserved
27:16 Chapter 3.3: Parallel transport preserved
31:46 Chapter 3.4: Area = holonomy on sphere
36:43 Chapter 4: Tying everything together
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I don't use his animation engine Manim, but I use PowerPoint, GeoGebra, and (sometimes) Mathematica to produce the videos.
Social media:
Facebook: facebook.com/mathemaniacyt
Instagram: instagram.com/_mathemaniac_
Twitter: twitter.com/mathemaniacyt
Patreon: patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: mathemaniac.myspreadshop.co.uk
Ko-fi: ko-fi.com/mathemaniac [for one-time support]
For my contact email, check my About page on a PC.
See you next time!
: https://www.mathemaniac.co.uk/download
The Mercator projection is the standard world map, but it famously makes Greenland and Africa the same size, but in reality, Greenland is so much smaller. Gall-Peters projection aims to solve exactly this area mismatch problem, but the shape resulted is horrible, and actually unsuitable for any navigation, unlike Mercator. Can we make a world map that preserves both areas (like Gall-Peters) and angles (like Mercator)? No, and the reason why is Theorema Egregium, the subject of the video.
Traditionally, Theorema Egregium was proved with a lot of tedious calculations, and somehow magically, you can compute the curvature with the first fundamental form, whatever that means. It took until more than a century later than its original discovery that a geometric proof was found, and is presented here.
Theorema Egregium, more traditional proof, going through first and second fundamental forms: https://www.dpmms.cam.ac.uk/~gpp24/dgnotes/dg.pdf
Tristan Needhams book on visual differential geometry: https://www.amazon.co.uk/Visual-Differential-Geometry-Forms-Mathematical/dp/0691203709
Video chapters:
00:00 Introduction
02:40 Chapter 1: Curvature
10:32 Chapter 2: Spherical areas
17:34 Chapter 3.1: Gauss map preserves parallel transport
22:15 Chapter 3.2: Geodesics preserved
27:16 Chapter 3.3: Parallel transport preserved
31:46 Chapter 3.4: Area = holonomy on sphere
36:43 Chapter 4: Tying everything together
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I use PowerPoint, GeoGebra, and (sometimes) Mathematica to produce the videos.
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: https://mathemaniac.myspreadshop.co.uk
Ko-fi: https://ko-fi.com/mathemaniac [for one-time support]
For my contact email, check my About page on a PC.
See you next time!")
 #1: https://youtu.be/-fD_n2ZMSE4
Geometry allows us to make some abstract concepts more intuitive, including integration. In this video, we will see how we can use geometry to compute integral of sine function, which offers a more natural explanation to its relationship with cosine function.
I now realized that Mathologer did the exact same thing in a Flammable Maths video: https://youtu.be/gO8AwBmQK5Q
Original text: Note: As far as I am aware, this idea is original. If you can see any other sources doing the same integral in exactly the same way, please let me know.
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
#mathemaniac #math #integration #sinefunction #DIw/oI")
=18?
We only showed 18-vertex graphs work, but what about 17-vertex graphs? How do we construct explictly a counter-example that does not have 4 vertices all connected in red or 4 vertices all connected in green? This is the last installment of the trilogy of Ramsey numbers.
Useful link:
https://plus.maths.org/content/proving-r4417
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
#mathemaniac #math #ramsey #mathematics #ramseynumbers #ramseytheory #graph #graphtheory")
? What is exp? | Lie groups, algebras, brackets #4
Part 5: https://youtu.be/B2PJh2K-jdU
Can we exponentiate vectors? What does e^(d/dx) mean? Does it make sense to exponentiate a whole bunch of vectors? Well yes! While what these exponentials do seem very different at first, they can be recast into the same framework.
Files for download:
Go to https://www.mathemaniac.co.uk/download and enter the following password: expderivativeshift
CHAPTERS:
00:00 Introduction
01:03 What is exponentiation?
04:15 Exponentiating vectors
11:23 Exponentiating derivatives
24:04 Exponentiating vector fields
❗Remark❗
1️⃣ I know that many people would be thinking of series expansion of exponentials. I deliberately avoid this because it is not conducive to learning the intuition of the exponential, and more crucially, it does not apply to the exponential of vectors on manifolds. The result is very manifold-dependent, and I will be very impressed if there is a series-like explanation for the exponential map in differential geometry.
2️⃣ However, I want to know: is there a generalisation of the translation operator statement in the video to manifolds? For a flat plane, we have exp(a * nabla) f(x) = f(x + a). And in fact,the exponential map on the flat manifold of R^n gives x + a = exp_x (a). Hence, for flat R^n, we have exp(a * nabla) f(x) = f(exp_x(a)). Can this be generalised to general manifolds? Is it true if I interpret nabla as not a normal gradient, but covariant derivative? Please let me know if you have any ideas for it. I want this to be true because it connects different “exponential” ideas.
📖 Further reading 📖
1️⃣ Exp vectors
Exponential map in Riemannian geometry (if you actually want to know how this is just a generalised exponential map in the usual sense, rather than just having the same “philosophy”, then go to the relationship to Lie theory section - when they say translations, they mean multiply on the left/right by g, a group element of the Lie group): https://en.wikipedia.org/wiki/Exponential_map_(Riemannian_geometry)
Why exponential map in differential geometry is useful: https://en.wikipedia.org/wiki/Normal_coordinates
❗You might also need to learn these first before tackling the link above❗
Riemannian metric: https://www.ime.usp.br/~gorodski/teaching/mat5771/ch1.pdf
Connection (the introduction is the most illuminating part): https://en.wikipedia.org/wiki/Affine_connection
https://math.stackexchange.com/questions/2145255/what-is-the-affine-connection-and-what-is-the-intuition-behind-for-affine-conne
Levi-Civita connection (a particular kind of connection that makes the metric invariant): https://en.wikipedia.org/wiki/Levi-Civita_connection
2️⃣ Exp d/dx
What I have described is kind of solving PDE with the method of characteristics (identifying characteristic curves along which it becomes an ODE): https://en.wikipedia.org/wiki/Method_of_characteristics#Example
The partial differential equation is part of the wave equation: https://en.wikipedia.org/wiki/Wave_equation#General_solution
Translation operator in quantum mechanics: https://en.wikipedia.org/wiki/Translation_operator_(quantum_mechanics)
Time-ordering: solving differential equations of the form ∂f/∂t = X(t) f, where X(t) is a time-dependent differential operator, e.g. t^2*∂^2/∂x^2: https://en.wikipedia.org/wiki/Ordered_exponential
Time-ordering in example in QM: https://en.wikipedia.org/wiki/Dyson_series
3️⃣ Exp vector field
Vector flow: https://en.wikipedia.org/wiki/Vector_flow
This is more related to the video: https://en.wikipedia.org/wiki/Flow_(mathematics)
Textbook: https://www.worldscientific.com/doi/pdf/10.1142/9789813276628_0001
I actually wanted to say the following, but I think the video is long enough and didn’t include it into the script, but vector field is actually related to (and most often described by) differential operators, and in that sense both exponential of (1st-order) differential operators and exponential of vector fields yield very similar things: https://en.wikipedia.org/wiki/Vector_field
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I use PowerPoint, GeoGebra, and (sometimes) Mathematica to produce the videos.
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: https://mathemaniac.myspreadshop.co.uk
Ko-fi: https://ko-fi.com/mathemaniac [for one-time support]
For my contact email, check my About page on a PC.
See you next time!")

 = Ax. The components of this vector field are linear functions (given by the rows of A). Its divergence div F is a constant function, whose value is equal to tr(A).
Actually, this is one of the last concepts in linear algebra that I really wanted a visualisation for, the other being transpose, but this is already on the channel: https://www.youtube.com/watch?v=g4ecBFmvAYU
Chapters:
00:00 Introduction
00:48 Matrix as vector field
02:24 Divergence
04:50 Connection between trace and divergence
10:12 Trace = sum of eigenvalues
13:32 Determinant and matrix exponentials
15:15 Trace is basis-independent
18:10 Jacobis formula
Further reading:
Trace (the origin of the whole video): https://en.wikipedia.org/wiki/Trace_(linear_algebra)#Derivative_relationships
Divergence (more qualitative, and subtly different from the video): https://en.wikipedia.org/wiki/Divergence#Physical_interpretation_of_divergence
Jacobis formula (more formal proof): https://en.wikipedia.org/wiki/Jacobi%27s_formula
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I use PowerPoint, GeoGebra, and (sometimes) Mathematica to produce the videos.
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: https://mathemaniac.myspreadshop.co.uk
Ko-fi: https://ko-fi.com/mathemaniac [for one-time support]
For my contact email, check my About page on a PC.
See you next time!")
er theorem (in the finite case). It emerges very apparently when counting the total number of symmetries in some tricky but easy way. This video series continues to develop your intuition towards some fundamental concepts and results in Group theory.
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
#mathemaniac #math #grouptheory #groups #orbitstabiliser #orbitstabilizer")

Should’ve been titled “accidentally stumbling onto an area of active research way out of my depth”.
The Plateaus problem asks for the minimal surface (with minimum surface area) with a given boundary. Because nature seems to solve this problem easily, as demonstrated by soap films, we turn to physics for inspiration. This is simulated by (hyperbolic) mean curvature flow, which turns out to be a hot topic for research in both maths and physics, and somehow also used in 3D graphics.
Files for download:
Go to https://www.mathemaniac.co.uk/download and enter the following password: meancurvatureflow
**Further reading**:
/Mathematical/ side of things:
1) General overview of Plateaus problem:
https://arxiv.org/pdf/1509.03797
2) General overview of the field of geometry in 2000 (by Shing-Tung Yau): https://www.intlpress.com/site/pub/files/_fulltext/journals/ajm/2000/0004/0001/AJM-2000-0004-0001-a016.pdf
3) The relevant Wiki articles:
https://en.wikipedia.org/wiki/Minimal_surface
https://en.wikipedia.org/wiki/Plateau%27s_problem
4) An undergrad/masters project on mean curvature flow:
https://www.math.mcgill.ca/gantumur/math581w12/downloads/OlivierMercier.pdf
/Physical/ side of things:
1) Original Brakkes paper on mean curvature flow in annealing metal (1978): https://kenbrakke.com/papers/downloads/motionbook.pdf
2) What got me started for this video: https://farside.ph.utexas.edu/teaching/336L/Fluidhtml/node41.html
3) Implementation on how to simulate soap films:
https://cs.uwaterloo.ca/~thachisu/hgf.pdf
4) Research into how instability arises:
http://www.damtp.cam.ac.uk/user/gold/pdfs/CatenoidCollapse.pdf
5) The YouTube video on @cambridgeuniversity for soap film collapse:
https://www.youtube.com/watch?v=3QgHxnDsrGQ
6) Relevant Wiki articles (on Young-Laplace equation):
https://en.wikipedia.org/wiki/Young%E2%80%93Laplace_equation
7) An undergrad/masters thesis on physics of soap films:
https://www.princeton.edu/~stonelab/Teaching/FredBraszFinalPaper.pdf
/Computer graphics/ side of things:
1) How to smooth 3D contours with mean curvature flow:
https://mathematica.stackexchange.com/questions/172517/smoothing-3d-contours-as-post-processing/172603#172603
2) How to improve on the mean curvature flow procedure to solve Plateaus problem:
https://mathematica.stackexchange.com/questions/72203/can-mathematica-solve-plateaus-problem-finding-a-minimal-surface-with-specifie
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I use PowerPoint, GeoGebra, and (sometimes) Mathematica to produce the videos.
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: https://mathemaniac.myspreadshop.co.uk
Ko-fi: https://ko-fi.com/mathemaniac [for one-time support]
For my contact email, check my About page on a PC.
See you next time!")
, we conduct a numerical simulation to calculate the average distance between two points in a unit disc. It turns out that the simulation is not as straightforward as you previously thought - it requires a bit of tweaking to sample points in the unit disc correctly.
There will be concepts including inverse transform sampling, t-distribution, and t-tests in the video, with inverse transform sampling having a more detailed explanation, because it is a considerably simpler concept which doesnt require too much prior knowledge. There is also a passing mention of the Box-Muller transform, which is used as an example of the pitfall of the inverse transform sampling - even though it works for all distributions, sometimes it isnt computationally efficient.
Even though this problem highlights the unity and utility of the undergraduate mathematics curriculum (from the paper below), I would assume you know nothing, so dont worry if you are not in university / have a degree in mathematics! If you are in college / university, hopefully the first few videos can be a nice revision and application of the concepts, and possibly a new perspective on the concepts.
The paper that I am following (very readable, for an undergraduate at least):
https://www.tandfonline.com/doi/abs/10.1080/07468342.1997.11973860
I do notice that MindYourDecisions made a similar video (https://www.youtube.com/watch?v=i4VqXRRXi68 ) a few years ago but for a unit *square* instead. I still make this video series because (1) the unit disc version is much harder to tackle in the sense that we are not even attempting to evaluate the integral, and (2) Preshs video seemed to pull pdfs and Jacobian out of nowhere, which might be confusing to people who have not gone to college to study mathematics, and genuinely quite a different level of difficulty from his other videos, so I am going to actually explain what those are.
Thank you so much for the overwhelming support for the video about the Dream Minecraft speedrun cheating drama! Hopefully this channel makes you like mathematics a bit more!
**CORRECTION**
6:06 I said F^(-1)(Y) less than r, but actually should be x, as said on the screen, because my script has been revised.
8:11 I mean *sample size* not the number of samples.
**SLIGHT CAVEAT**
Technically, we should consider F(x) to be the probability that X smaller than *or equal to* x, because this will be different if the distribution does not have a well-defined probability density. In those cases, the inverse of F is not as straightforward, but we can still define the inverse. See the inverse transform sampling method Wikipedia page below.
I might not have stressed enough, but it is shown on the screen, that in the general case, Y is a random number generator from 0 to 1. The range here is important because this will allow us to say that the probability that Y is less than or equal to F(x) is exactly F(x).
**RESOURCES FOR MORE DETAILS**
Numerical simulation data:
https://docs.google.com/spreadsheets/d/1ltcLYBESXmATluMYh_lUl2YUXctDNNcxI4lknqRhllY/edit?usp=sharing
More about sampling methods described:
https://en.wikipedia.org/wiki/Inverse_transform_sampling
https://en.wikipedia.org/wiki/Box%E2%80%93Muller_transform
https://en.wikipedia.org/wiki/Ziggurat_algorithm (an alternative algorithm for sampling a normally distributed variable)
Single-sample and unpaired two-sample t-tests:
https://www.youtube.com/watch?v=QZ7kgmhdIwA
Single-sample t-test (more detailed):
https://www.youtube.com/watch?v=NQWZefn41VY
(or consult any statistics textbook!)
Crash Course statistics playlist:
https://www.youtube.com/watch?v=zouPoc49xbk&list=PL8dPuuaLjXtNM_Y-bUAhblSAdWRnmBUcr&index=1
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I will probably reveal how I did it in a potential subscriber milestone, so do subscribe!
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
For my contact email, check my About page on a PC.
See you next time!")

 because they are much more visualisable, and that symmetries of an object do form a group using the abstract definition of the group that is usually given.
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I will probably reveal how I did it in a potential subscriber milestone, so do subscribe!
#mathemaniac #math #grouptheory #groups #intuition
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
For my contact email, check my About page on a PC.
See you next time!")
.
I have made this slower in comparison with some of my other videos, because when I myself watched some of my other videos that are faster, I couldnt comprehend if I was not paying too much attention on the screen, let alone the audience watching it for the first time. If somehow, miraculously, you think this is way too slow, feel free to speed it up!
I said the more general Cauchy integral formula is related, because in my original plan, I did want to say that Laurent coefficients take on exactly the same form, but it just occurred while I was finally editing the video that we dont find Laurent coefficients using integrals, and I dont want to send my Cauchy integral formula bit to waste, so here it is.
Throughout this video series, of course I have left out lots of theorems in complex analysis, only talking about the things that I find more applicable (read: more audience want to watch). Things like Fundamental theorem of algebra, or maximum modulus principle, or even winding numbers are not presented, but in my defense, they are not really essence of anymore, because they use the concepts that we have developed in this series instead - like Cauchy integral formula as seen here.
This video was sponsored by DataCamp.
📖📖MORE READING📖📖
(Simply connected version) https://en.wikipedia.org/wiki/Cauchy%27s_integral_theorem
(Homologous to 0 version)
https://www-users.cse.umn.edu/~brubaker/docs/8701-F13/dixon.pdf
Surely, You’re Joking, Mr Feynman: https://www.amazon.co.uk/Surely-Youre-Joking-Feynman-Adventures/dp/009917331X
Math StackExchange thread: https://math.stackexchange.com/questions/253910/the-integral-that-stumped-feynman
Residue theorem example links:
Wikipedia: https://en.wikipedia.org/wiki/Residue_theorem#An_integral_along_the_real_axis
[The example that I nicked from]
You will need - estimation lemma (a.k.a. ML lemma): https://en.wikipedia.org/wiki/Estimation_lemma
If you want to watch other videos on the exact same integral instead (although I think the Wikipedia page is a more “elementary” way of finding residues), you might want to have a look at:
Classifying singularities: https://sites.oxy.edu/ron/math/312/14/ws/24.pdf (page 1)
More ways of calculating residues: https://en.wikipedia.org/wiki/Residue_(complex_analysis)#Calculating_residues
YouTube videos talking about exactly the same integral (though they all assume quite a bit of familiarity of the above):
Flammable maths: https://www.youtube.com/watch?v=YWBdwYr6PGg
qncubed3: https://www.youtube.com/watch?v=DvND8J32gOA
tahiri math science online teaching: https://www.youtube.com/watch?v=oGEo_BxqZ3c
🎶🎶Music used🎶🎶
Aakash Gandhi - Heavenly / Kiss the Sky / Lifting Dreams / White River
Asher Fulero - The Closing of Summer
Video chapter:
00:00 Complex integration (first try)
06:01 Pólya vector field
08:18 Complex integration (second try)
12:27 Cauchys theorem
18:39 Integrating 1/z
22:28 Other powers of z
28:26 Cauchy integral formula
31:43 Residue theorem
36:14 But why?
Other than commenting on the video, you are very welcome to fill in a Google form linked below, which helps me make better videos by catering for your math levels:
https://forms.gle/QJ29hocF9uQAyZyH6
If you want to know more interesting Mathematics, stay tuned for the next video!
SUBSCRIBE and see you in the next video!
If you are wondering how I made all these videos, even though it is stylistically similar to 3Blue1Brown, I dont use his animation engine Manim, but I will probably reveal how I did it in a potential subscriber milestone, so do subscribe!
Social media:
Facebook: https://www.facebook.com/mathemaniacyt
Instagram: https://www.instagram.com/_mathemaniac_/
Twitter: https://twitter.com/mathemaniacyt
Patreon: https://www.patreon.com/mathemaniac (support if you want to and can afford to!)
Merch: https://mathemaniac.myspreadshop.co.uk
For my contact email, check my About page on a PC.
See you next time!")