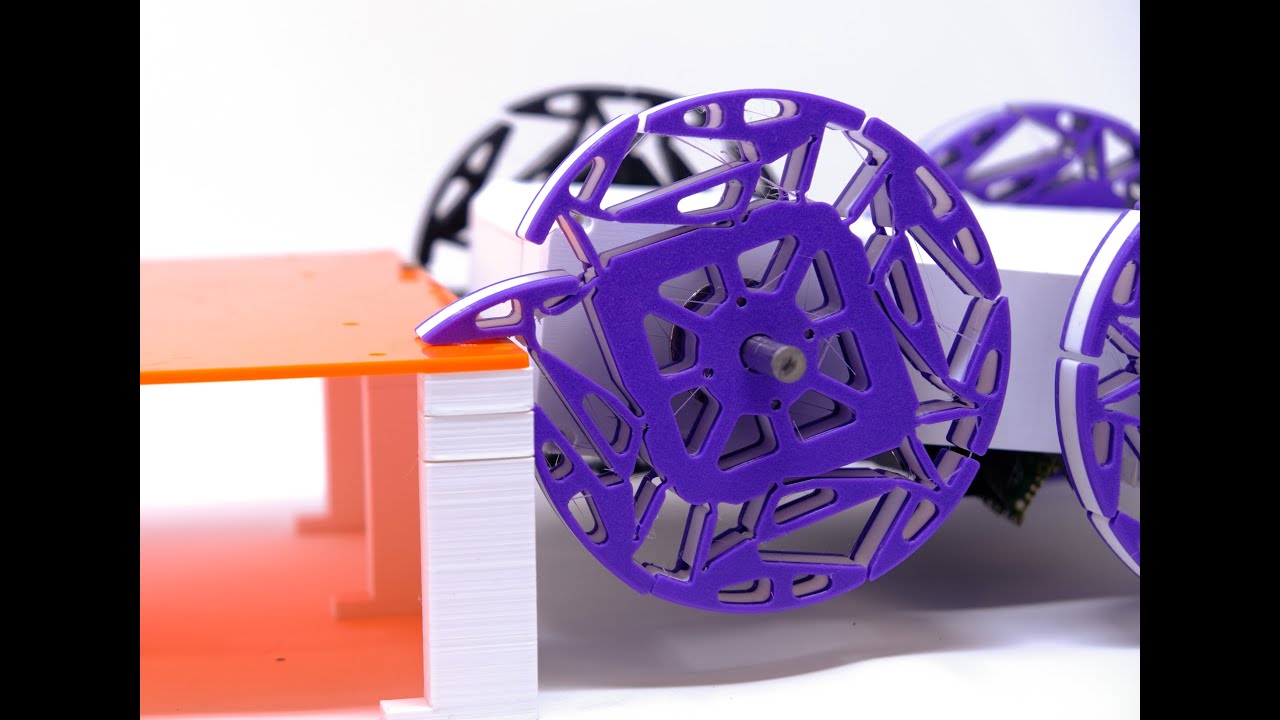
PaTS-Wheel: A Passively-Transformable Single-Part Wheel for Mobile Robot Navigation Morph Lab, Imperial 2024-04-26 | T. Godden*, B. W. Mulvey*, E. Redgrave and T. Nanayakkara, “PaTS-Wheel: A Passively-Transformable Single-Part Wheel for Mobile Robot Navigation on Unstructured Terrain,” IEEE Robotics and Automation Letters, 2024.Link to IEEE RA-L paper: ieeexplore.ieee.org/document/10502024Link to paper preprint: drive.google.com/file/d/1sfFv9QlnWzGoRmwhjMpW63MBBSih5Ftv/viewLink to STEP/STL files: drive.google.com/drive/folders/1qYp3pHp8Ygxbl1eEl9b0zwX7cxRnPBFj?usp=drive_linkDigital Object Identifier: 10.1109/LRA.2024.3389828Abstract:Most mobile robots use wheels that perform well on even and structured ground, like in factories and warehouses. However, they face challenges traversing unstructured terrain such as stepped obstacles. This paper presents the design and testing of the PaTS-Wheel: a Passively-Transformable Single-part Wheel that can transform to render hooks when presented with obstacles. The passive rendering of this useful morphological feature is guided purely by the geometry of the obstacle. The energy consumption and vibrational profile of the PaTS-Wheel on flat ground is comparable to a standard wheel of the same size. In addition, our novel wheel design was tested traversing different terrains with stepped obstacles of incremental heights. The PaTS-Wheel achieved 100% success rate at traversing stepped obstacles with heights ≈70% its diameter, higher than the results obtained for an equivalent wheel (≈25% its diameter) and an equivalent wheg (≈61% its diameter). This achieves the design objectives of combining the energy efficiency and ride smoothness of wheels with the obstacle traversal capabilities of legged robots, all without requiring any sensors, actuators, or controllers.
An artistic depiction of NASAs search for extra-terrestrial life Morph Lab, Imperial 2024-10-14 | Today marks a significant event in mankind's search for extra-terrestrial life with the launch of Europa Clipper. In this video Kalind Carpenter at NASA JPL talks about how an artist could see the search for life outside Earth with specific examples from the Jupiter's planet Europa.
Camel and Mountain Goat inspired hoof testing at NASA JPL Morph Lab, Imperial 2024-10-01 | During the last month of my sabbatical, I had the opportunity to visit Caltech and NASA Jet Propulsion Laboratory (JPL) to test some ideas about how mechanical intelligence of naturally evolved structures such as the Camel hoof and the Mountain Goat hoof can be used to support space missions. For instance, Camel hoof has evolved to minimize sinking on sand and have good grip while walking on sand. Mountain Goat hoof has evolved to maximise grip on steep slopes or to autonomously re-establish grip during a slip. One immediate application we could think of was to use these hoofs as mechanically intelligent anchors to support supernumerary limbs mounted on future Astronaut suits to stabilize them on sand as shown in the pictures of this video. This will allow them to focus on manipulation tasks done in unstable postures. We tested the Camel hoof in the Lunar Yard with a special sand simulating the lunar surface. We could see that the hoof self stabilizes even on slopes of sand. We tested the Goat hoof on steep rock surfaces in a nearby mountain.This collaboration with Kalind Carpenter at JPL was one of the most enjoyable times I had during my sabbatical in 2024.
Barry Mulvey’s DeforMoBot Paper Presentation at IROS 2023 Morph Lab, Imperial 2024-01-31 | This is Barry Mulvey’s #IROS2023 presentation of his IEEE RA-L paper on a bio-inspired deformable mobile robot (DeforMoBot) that can squeeze through gaps. He uses a whisker that not just helps to estimate the stiffness of the gap but also helps to push the gap to be wider if it appears feasible for soft gaps.Imagine what these robots can do to help you at home, agriculture, and factories.Website: barrymulvey.github.io/deformobotPaper: ieeexplore.ieee.org/document/10119142
Masters student Elyse Marshall demonstrating her muscle guarding simulator for the Robopatient Morph Lab, Imperial 2023-06-17 | ...
DeforMoBot: A Bio-Inspired Deformable Mobile Robot for Navigation Among Obstacles Morph Lab, Imperial 2023-05-16 | B. W. Mulvey, T. D. Lalitharatne, and T. Nanayakkara, “DeforMoBot: A Bio-Inspired Deformable Mobile Robot for Navigation Among Obstacles,” IEEE Robotics and Automation Letters, 2023.Link to IEEE RA-L paper: ieeexplore.ieee.org/document/10119142Link to paper preprint: drive.google.com/file/d/10acy0u7WWyRAN0CVAYW9qRrTk_zE9OiP/viewDigital Object Identifier: 10.1109/LRA.2023.3273393 Abstract:Many animals can move in cluttered environments by conforming their body shape to geometric constraints in their surroundings such as narrow gaps. Most robots are rigid structures and do not possess these capabilities. Navigation around movable or compliant obstacles results in a loss of efficiency—and possible mission failure—compared to progression through them. In this paper, we propose the novel design of a deformable mobile robot; it can adopt a wider stance for greater stability (and possible higher payload capacity), or a narrower stance to become capable of fitting through small gaps and progressing through flexible obstacles. We use a whisker-based feedback control approach in order to match the amount of the robot's deformation with the compliance level of the obstacle. We present a real-time algorithm which uses whisker feedback and performs shape adjustment in uncalibrated environments. The developed robot was tested navigating among obstacles with varying physical properties from different approach angles. Our results highlight the importance of co-development of environment perception and physical reaction capabilities for improved performance of mobile robots in unstructured environments.
IROS2022 best application paper award Morph Lab, Imperial 2022-10-28 | This is the talk given by Pilar Zhang Qiu in the IROS 2022 best application paper nominated paper session. The paper was titled "Soft tissue characterisation using a novel medical percussion device with acoustic analysis and neural networks".Physicians have been using percussion to For centuries, physicians have been using a technique called percussion to examine patients, where they place one hand flat on the abdomen and tap on it using the other hand with a relaxed wrist. So far, we have not understood the scientific principles behind this manual examination technique. Are they using a process like bats but with tactile echoes? Are they just listening to the sounds? Or are they doing both?Design Engineering Masters students, Pilar Zhang Qiu, Jacob Tan, Oliver Thompson, and Ben Cobley who took my 4th year Robotics Research Projects module ( https://lnkd.in/d6jmjiRj ), designed a percussion device with a spring-loaded hammer and tapped on a silicone rubber phantom with a buried hard nodule. They measured the vibrations away from the nodule and decomposed them into primitive wave shapes using Wavelet Transforms. They saw unique wave patterns carrying information about the hard nodule. A pattern classification algorithm was used to make conclusions about the nodule. The results were peer reviewed and accepted for publication in IEEE Robotics and Automation Letters (RAL), which is one of the flagship journals in robotics and IROS 2022 held in Kyoto.
Facial expressions of pain in the latest robo patient Morph Lab, Imperial 2021-10-12 | In this video, you can see how the latest robo patient face can show pain when somebody palpates a painful area of the body. This has been implemented using four actuators to change shape of the face to suit different ethnic and gender groups with finer details of expressions projected onto the face.
Spring-bot: A robot to vertically climb rainforest trees by Sacha Hussey Morph Lab, Imperial 2021-06-28 | Sacha Hussey graduated from the Dyson School of Design Engineering, Imperial College London. She did her masters project in the Morphlab. This is her masters viva talk titled "Spring-bot: A robot that uses wheels and the passive compliance of springs to vertically climb rainforest trees". In this talk, she presents her experiments done amidst the COVID-19 pandemic. She turned the lockdown situation to her advantage to think of a design approach that suits any developing country. She used minimum expensive material and used fabrication methods that are available in most countries. This approach makes the robot very suitable for her final goal of being used to sample non-timber rainforest resources as an alternative commercial incentive to reduce deforestation.
[ICRA 2021] - [RoPat21 Workshop] - Robot Assisted Systems for Medical Training Afternoon Session Morph Lab, Imperial 2021-05-31 | ICRA2021 Workshop - Robot Assisted Systems for Medical Training, Afternoon Session, 31 May 2021
[ICRA 2021] - [RoPat21 Workshop] - Robot Assisted Systems for Medical Training Morning Session Morph Lab, Imperial 2021-05-31 | ICRA2021 Workshop - Robot Assisted Systems for Medical Training, Morning Session, 31 May 2021.
【RoPat21】AP: Proposal of a Method to Transfer EmotionalMeaning through Abstarct Visualizations Morph Lab, Imperial 2021-05-27 | 【ICRA2021】【RoPat21】Accepted Workshop Paper Proposal of a Method to Transfer Emotional Meaning through Abstarct VisualizationsLuke Holland
【RoPat21】Accepted Paper Modelling Variations in Dynamic FacialExpressions of Pain Morph Lab, Imperial 2021-05-27 | 【ICRA2021】【RoPat21】Accepted Workshop Paper Modelling Variations in Dynamic FacialExpressions of PainChaona Chen, Oliver G. B. Garrod, Robin A. A. Ince, Philippe G. Schyns, Rachael E. Jack
Realistic Pain Expression Simulation Using Perception based Weighted Action Units Morph Lab, Imperial 2021-05-25 | 2021 Society of Affective Science Annual Conference Accepted PresentationYongxuan Tan, Thilina Dulantha Lalitharatne, Liang He, and Thrishantha Nanayakkara
MorphFace: A Hybrid Morphable Face for a Robopatient Morph Lab, Imperial 2020-12-24 | This video shows robot designs for the paper published in IEEE Robotics and Automation Letters under the title "MorphFace: A Hybrid Morphable Face for a Robopatient". Authors: Thilina Dulantha Lalitharatne, Yongxuan Tan, Liang He, Florence Leong, Nejra Van Zalk, Simon de Lusignan, Fumiya Iida, and Thrishantha Nanayakkara
【IROS】RoPat20 workshop Panel Discussion session 2 Morph Lab, Imperial 2020-10-24 | RoPat20: IROS 2020 WorkshopRobot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?imperial.ac.uk/morph-lab/events/ropat20-iros-workshopPanel 1 speakersChair: Liang He Imperial College London, UKRobert Howe Harvard University, US Angela Faragasso University of Tokyo, Japan Allen Jiang Google Healthcare, US Simon de Lusignan Unversity of Oxford, UK Panel 2 speakers Chair: Simon Hauser University of Cambridge, UKShinichi Hirai Ritsumeikan University, JapanPerla Maiolino University of Oxford, UKLou Halamek Stanford University, US Rachael Jack University of Glasgow, UK
【IROS】RoPat20 workshop Panel Discussion session 1 Morph Lab, Imperial 2020-10-24 | RoPat20: IROS 2020 WorkshopRobot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?imperial.ac.uk/morph-lab/events/ropat20-iros-workshopPanel 1 speakerschair: Florence Leong – Imperial College LondonKazuo Kiguchi Kyushu University, Japan Mazdak Ghajari Imperial College London Dhan Thiruchelvam Newcastle Private, AustraliaPhilip Chiu Chinese University of Hong KongPanel 2 speakerschair: Thilina Dulantha Lalitharatne – Imperial College London Chee Kong Chui National University of SingaporeTom Williamson RMIT, Australia Clinical Simon de Lusignan University of Oxford, UK Jithangi Wanigashinghe University of Colombo, Sri LankaPanel 3 speakers chair: Luca Scimeca – University of Cambridge Technical Shinichi Hirai Ritsumeikan University, Japan Neha Singh India Institutes of Technology, Delhi Randy Koh National Heart Institute, Malaysia Arvind Vadivelu Melbourne University, Australia
[IROS] - [RoPat2020] - workshop panel discussion Morph Lab, Imperial 2020-10-24 | workshop panel discussion for robot-assisted medical examination
【IROS2020】RoPat Workshop - Speaker Talk - Racheal Jack & Philippe Schyns Morph Lab, Imperial 2020-10-22 | Professor Racheal E Jack, Professor of Computational Social Cognition, School of Psychology, University of GlasgowProfessor Philippe Schyns,Professor of Psychology,Centre for Cognitive Neuroimaging, School of Psychology,University of Glasgow.Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Interview with the clinicians - Paolo Traverso and Carlo Terrone Morph Lab, Imperial 2020-10-21 | Interview with Prof. Paolo TraversoDivision of Urology, University of GenoaThe workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
【RoPat20】Accepted Paper Towards a Soft Hand Tremor Suppression Device for Primary Care Morph Lab, Imperial 2020-10-16 | 【IROS2020】【RoPat20】Accepted Workshop Paper Towards a Soft Hand Tremor Suppression Device for Primary CareAshan T. Wanasinghe, W. V. I. Awantha, Pasindu Kavindya, Asitha L. Kulasekera, Damith S. Chathuranga, Bimsara SenanayakeDepartment of Mechanical Engineering University of Moratuwa Moratuwa, Sri Lanka
【RoPat20】Accepted Paper Design And Implementation Of A Robotic Device For Medical Percussion Morph Lab, Imperial 2020-10-16 | 【IROS2020】【RoPat20】Accepted Workshop Paper Accepted Paper Design And Implementation Of A Robotic Device For Medical PercussionYongxuan Tan1, Bennet Cobley1, Oliver Thompson1, Pilar Zhang Qiu11, Dyson School of Design Engineering, Imperial College London
【RoPat20】Accepted Paper Feasibility of using Cartoon Faces for Expressing Pain to be used... Morph Lab, Imperial 2020-10-16 | 【IROS2020】【RoPat20】Accepted Workshop Paper Feasibility of using Cartoon Faces for Expressing Pain to be used in a Robotic Patient: A Preliminary StudyMihan Perera, Sanju Uyanahewa, Pasindu Ranathunga, Thilina Dulantha Lalitharatne, Kanishka Madusanka and Thrishantha Nanayakkara1, Department of Mechanical Engineering, University of Moratuwa, Sri Lanka2, Dyson School of Design Engineering, Imperial College London, UK
【RoPat20】Accepted Paper Acoustic Response Analysis Of Medical Percussion Using Wavelet Transform... Morph Lab, Imperial 2020-10-16 | 【IROS2020】【RoPat20】Accepted Workshop Paper Acoustic Response Analysis Of Medical Percussion Using Wavelet Transform And Neural NetworksPilar Zhang Qiu1, Oliver Thompson1, Yongxuan Tan1, Bennet Cobley11.Dyson School of Design Engineering, Imperial College London
【RoPat20】Accepted Paper Spatial Rigid/Flexible Dynamic Model of Biopsy and Brachytherapy Needles Morph Lab, Imperial 2020-10-16 | 【IROS2020】【RoPat20】Accepted Workshop Paper Spatial Rigid/Flexible Dynamic Model of Biopsy and Brachytherapy Needles Under a General Force FieldAthanasios Martsopoulos, Rajendra Persad, Stefanos Bolomytis, Thomas L. Hill and Antonia Tzemanaki
【RoPat20】Accepted Paper 3D Real-Time Multi-Object Interaction And Soft Tissue Deformation Simulation Morph Lab, Imperial 2020-10-16 | 【IROS2020】【RoPat20】Accepted Workshop Paper 3D Real-Time Multi-Object Interaction And Soft Tissue Deformation SimulationYongxuan Tan, Dyson School of Design Engineering, Imperial College London
IROS2020】RoPat Workshop - Speaker Talk - Nejra van Zalk Morph Lab, Imperial 2020-10-13 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop/panel-ideation-discussions
【IROS2020】RoPat Workshop - Speaker Talk - Angela Faragasso Morph Lab, Imperial 2020-10-13 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Speaker Talk - Mazdak Ghajari Morph Lab, Imperial 2020-10-09 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?
【IROS2020】RoPat Workshop - Speaker Talk - Lauren Riek Morph Lab, Imperial 2020-10-09 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Speaker Talk - Fumiya Iida Morph Lab, Imperial 2020-10-09 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Speaker Talk - Thrishantha Nanayakkara Morph Lab, Imperial 2020-10-09 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Keynote Speaker Talk - Robert Howe Morph Lab, Imperial 2020-10-09 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Keynote Speaker Talk - Simon de Lusignan Morph Lab, Imperial 2020-10-09 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Interview with the clinicians - Dr. Andrea Calandrino Morph Lab, Imperial 2020-09-29 | Interview with Dr. Andrea CalandrinoDr. Andrea Calandrino is a Resident Physician at Giannina Gaslini Children Hospital, University of GenoaThe workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Videos by organizers Morph Lab, Imperial 2020-09-21 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?thrish.org/projects/robopatient/iros-2020-workshopIntroduction:Physical examination during primary care remains to be an important part of establishing understanding, trust, and confidence in a doctor-patient relationship. It is a tacit knowledge among the physician community that simultaneous haptic, auditory, and visual perception are key to diagnose a physiological condition using physical examination. A medical student usually goes through a process of acquiring such physical examination skills by practising on real patients with feedback from experts. The complexity and nuances of taking actions such as finger stiffness, indentation, and speed control to condition sharpness of perception of physiological conditions over time is a complex process that cannot be easily taught in a clinical setting.Motivation:Recent advances in soft robotics, active perception, augmented reality, and information gain theory offer promising opportunities to improve the consistency and transparency of this process. For instance, they can be combined in various interventions such as providing functional robotic patients that can present physiological conditions, soft sensors to monitor and archive examination behaviors for subsequent comparisons. Such realistic platform can help medical practitioners diagnose patients more efficiently, reducing the need for harmful scans and traumatising interventions, such as biopsies. Such state-of-the-art innovations can be made possible through close collaborations between roboticists and medical practitioners, in which clinical needs and requirements can be effectively understood and addressed.
【IROS2020】RoPat Workshop - Interview with the clinicians - Dr. Nichola Davis Morph Lab, Imperial 2020-09-11 | Interview with Dr. Nichola DavisDr. Nichola Davis is a Senior Lecturer at James Cook University, Australia The workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Interview with the clinicians - Dr. Jithangi Wanigasinghe Morph Lab, Imperial 2020-09-11 | Interview with Dr. Jithangi WanigasingheDr. Jithangi Wanigasinghe is the Professor in Pediatric Neurology, University of Colombo, Sri LankaThe workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Interview with the clinicians - Dr. Dhan Thiruchelvam Morph Lab, Imperial 2020-09-11 | Interview with Dr. Dhan Thiruchelvam Dr. Dhan Thiruchelvam is the Director of Newcastle Weight Loss Surgery, and Upper GI and Bariatric Surgeon Newcastle Private, Australia.The workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Interview with the clinicians - Robot/medical training - Dr. Lou Hamalek Morph Lab, Imperial 2020-09-11 | Interview with Dr. Lou Hamalek Dr. Lou Hamalek is an Attending Neonatologist at Packard Children's Hospital and the Professor of Pediatrics at Stanford University.The workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
【IROS2020】RoPat Workshop - Interview with the clinicians - Dr. Arvind Vadivelu Morph Lab, Imperial 2020-09-11 | Interview with Dr. Arvind Vadivelu. Dr. Arvind Vadivelu is a surgical robotics researcher at the University of Melbourne and a clinical researcher in The Royal Victorian Eye and Ear Hospital.The workshop aims to bring together medical and robotics/engineering communities to identify future opportunities to develop robotic technologies in medical examination training.Find us at thrish.org/projects/robopatient/iros-2020-workshop
Predicting the MFPT to reach any state for a passive dynamic walker with steady state variability Morph Lab, Imperial 2020-07-23 | Paper discussion:Article Source: Predicting the mean first passage time (MFPT) to reach any state for a passive dynamic walker with steady state variabilityWijesundera I, Halgamuge MN, Nirmalathas A, Nanayakkara T (2018) Predicting the mean first passage time (MFPT) to reach any state for a passive dynamic walker with steady state variability. PLOS ONE 13(11): e0207665. doi.org/10.1371/journal.pone.0207665
RoPat20: IROS 2020 Workshop Morph Lab, Imperial 2020-07-10 | Robot-Assisted Training for Primary Care: How can robots help train doctors in medical examinations?ObjectivesIntroduction:Physical examination during primary care remains to be an important part of establishing understanding, trust, and confidence in a doctor-patient relationship. It is a tacit knowledge among the physician community that simultaneous haptic, auditory, and visual perception are key to diagnose a physiological condition using physical examination. A medical student usually goes through a process of acquiring such physical examination skills by practising on real patients with feedback from experts. The complexity and nuances of taking actions such as finger stiffness, indentation, and speed control to condition sharpness of perception of physiological conditions over time is a complex process that cannot be easily taught in a clinical setting.Motivation:Recent advances in soft robotics, active perception, augmented reality, and information gain theory offer promising opportunities to improve the consistency and transparency of this process. For instance, they can be combined in various interventions such as providing functional robotic patients that can present physiological conditions, soft sensors to monitor and archive examination behaviors for subsequent comparisons. Such realistic platform can help medical practitioners diagnose patients more efficiently, reducing the need for harmful scans and traumatising interventions, such as biopsies. Such state-of-the-art innovations can be made possible through close collaborations between roboticists and medical practitioners, in which clinical needs and requirements can be effectively understood and addressed.
Mountain goat hoofs are mechanical computers Morph Lab, Imperial 2020-05-27 | This talk is on the IEEE Transactions on Robotics paper titled "Significance of the Compliance of the Joints on the Dynamic Slip Resistance of a Bioinspired Hoof" 35(6), 1450-1463.Abstract: Robust mechanisms for slip resistance are an open challenge in legged locomotion. Animals such as goats show impressive ability to resist slippage on cliffs. It is not fully known what attributes in their body determine this ability. Studying the slip resistance dynamics of the goat may offer insight towards the biologically-inspired design of robotic hooves. This paper tests how the embodiment of the hoof contributes to solving the problem of slip resistance. We ran numerical simulations and experiments using a passive robotic goat hoof for different compliance levels of its 3 joints. We established that compliant yaw and pitch and stiff roll can increase the energy required to slide the hoof by $\approx 20 \%$ compared to the baseline (stiff hoof). Compliant roll and pitch allow the robotic hoof to adapt to the irregularities of the terrain. This produces an Anti-Lock Braking System-like behavior of the robotic hoof for slip resistance. Therefore, the pastern and coffin joints have a substantial effect on the slip resistance of the robotic hoof while the fetlock joint has the lowest contribution. These shed insights into how robotic hooves can be used to autonomously improve slip resistance.
Stiffness Imaging with a Continuum Appendage Morph Lab, Imperial 2020-05-21 | In this talk Hadi Sadati explains how a soft continuum robot appendage can be used to estimate the stiffness of a soft tissue using a force sensor mounted at the base of the robot. The significance of this method is that a force sensor is not needed at the tip of the robot. Moreover, the compliant dynamics of the continuum robot allow us to reduce the variability of the estimated stiffness of the soft tissue. In other words, the dynamics of the soft manipulator can be used to simply the numerical computations needed to estimate the stiffness of a soft tissue sample.
Soft Fingertips with Adaptive Sensing and Active Deformation for Robust Grasping of Delicate Objects Morph Lab, Imperial 2020-05-21 | This video presents a novel fingertip design with integrated tactile sensing and active shape-deformation. The fingertip can be used for grasping tasks of soft and delicate objects such as fruits. A significant increase in the robustness of the grasp is shown even during high-speed manipulations of the robotic arm. The fingertip design also enhanced the dexterity and flexibility of robot hands for in-hand manipulation. Details of the study are included in the following publications: Liang He, Icey Lu, Sara Adela Abad Guaman, Nicolas Rojas, and Thrishantha Nanayakkara, “Soft Fingertips with Adaptive Sensing and Active Deformation for Robust Grasping of Delicate Objects”, IEEE Robotics and Automation Letters (RAL), 2020Qiujie Lu*, Liang He*, Thrishantha Nanayakkara, and Nicolas Rojas, “Precise In-Hand Manipulation of Delicate Objects using Soft Fingertips with Adaptive Sensing and Active Deformation”, IEEE International Conference on Soft Robotics (RoboSoft) 2020
A Soft Pressure Sensor Skin for Hand and Wrist Orthoses Morph Lab, Imperial 2020-05-21 | This video shows the development process of a soft pressure sensor skin for static contact pressure measurement under hand and wrist orthosis. A patient involved approach was proposed to achieve an efficient data acquisition through strategically distributing the sensor units based on FEM results. This study has been published in the IEEE Robotics and Automation Letters (DOI: 10.1109/LRA.2020.2970947) and presented in the 2020 International Conference on Robotics and Automation (ICRA).
Diversity of lung tissue stiffness due to infection can lead to injuries during ventilation Morph Lab, Imperial 2020-04-11 | The take home message from this video is that the maximum pressure and flow rate of a ventilator should be regulated after accounting for the diversity of lung tissue stiffness levels. Since there is no way to estimate this at present for COVID-19 patients, our suggestion is to use lower pressure levels than what is deemed to be safe for other respiratory diseases.We came to know reports that say "critical care doctors are beginning to worry that stress caused by invasive ventilation may contribute to the grim measures of fatality among Covid-19 patients on ventilators" (Jon Hamilton report on "Ventilators Are No Panacea For Critically Ill COVID-19 Patients", NPR, April 2, 20203:43 PM ET). During this lockdown, we used what is available at home to make a simple lung simulator to show how different tissue compliance levels in lung tissue (mainly Alveoli) can lead to disproportionate inflation of compliant tissue (easier to inflate) relative to those with lower compliance (harder to inflate possibly due to infection). Such unexpected levels of inflation cannot be detected just using the pressure and air flow rate from the ventilator. Based on our basic phantom, we suspect that sound feedback from the chest may reveal areas experiencing disproportionate inflation. Further studies should be done to develop an index based on the sounds from the chest to be used as a feedback signal to regulate flow rate and pressure from ventilators to reduce injuries due to uneven tissue compliance. The purpose of this video is to engage medical experts and engineers who could team up with us to make a rapid impact on current efforts to minimize injuries to those in ventilators. My group works on soft robots with medical applications. We take a soft robotics approach to understand biological phenomena to do with physical computation. We were working on a project to develop a soft robotic patient to provide visual, haptic, and vocal feedback to trainee physicians during physical examination (see details at: thrish.org/projects/robopatient ). We were developing controllable soft organs such as the liver, to present various known physiological conditions to trainees. After the COVID-19 crisis kicked in, we decided to go out of the way to add a soft sensorised lung phantom as an assistive robotic tool for medics and nurses.
Stable Grip Control on Soft Objects With Time Varying Stiffness Morph Lab, Imperial 2020-04-11 | In this paper, we show a method to use a probabilistic controller with only 3 parameters to get a rigid robot to keep grip on a soft object that changes its stiffness. Thrishantha Nanayakkara, Allen Jiang, María. R. Armas Fernández, Hongbin Liu, Kaspar Althoefer, Joao Bimbo, “Stable Grip Control on Soft Objects With Time Varying Stiffness”, IEEE Transactions on Robotics, vol. 32, no. 3, pp. 626-637, 2016.