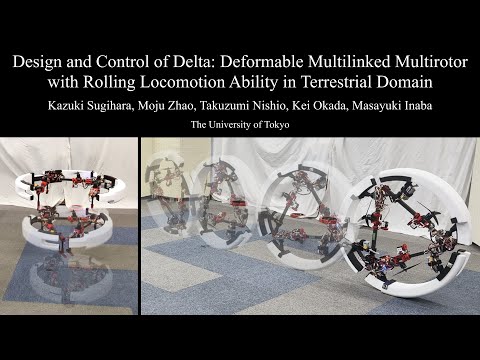
Delta: Deformable Multilinked Multirotor with Rolling Locomotion Ability in Terrestrial Domain Kazuki Sugihara 2024-03-11 | Title: Design and Control of Delta: Deformable Multilinked Multirotor with Rolling Locomotion Ability in Terrestrial DomainIn this paper, , we introduce design and an control method of a multilinked multirotor capable of rolling locomotion on the ground.Paper (arXiv): arxiv.org/abs/2403.06636JSK Robotics Laboratory, The University of Tokyo
Design and Control of a Humanoid Equipped with Flight Unit and Wheels for Multimodal Locomotion Kazuki Sugihara 2023-03-26 | Title: Design and Control of a Humanoid Equipped with Flight Unit and Wheels for Multimodal LocomotionIn this paper, we introduce an optimized construction method and an integrated control framework of a humanoid equipped with wheels and a flight unit for rapid terrestrial and aerial locomotion.Paper (arXiv): arxiv.org/abs/2303.14718Authors: Kazuki Sugihara, Moju Zhao, Takuzumi Nishio, Tasuku Makabe, Kei Okada, Masayuki InabaThis paper has been published in IEEE Robotics and Automation Letters (DOI: doi.org/10.1109/LRA.2023.3297065 ).JSK Robotics Laboratory, The University of Tokyo